7月23日に行った、2度目の伊吹山ドライブウェイのバーチャル・ヒルクライムの動画を公開しまし。
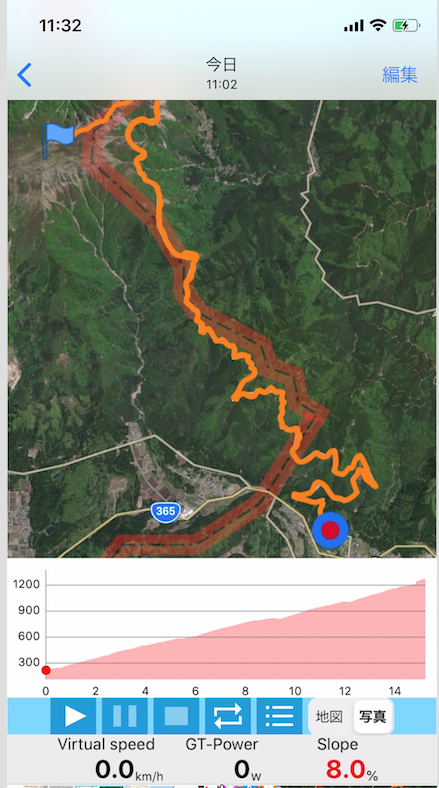
今回の動画では、ローラーとはいえバーチャルコース上のどこを走っているのかを示したいと思い、該当スマホアプリ「GT-eRemote」の画面をPinPで組み込んでみました。
コースについては、先日(7月16日)に行った最初の「バーチャル・ヒルクライム」と同じ伊吹山ドライブウェイですが、今回はローラー側のパワー校正をやり直したバージョンです。
前回のバーチャル・ヒルクライムでは、勾配に対するローラー負荷の設定が軽すぎる…と感じたので、それに対応しました。
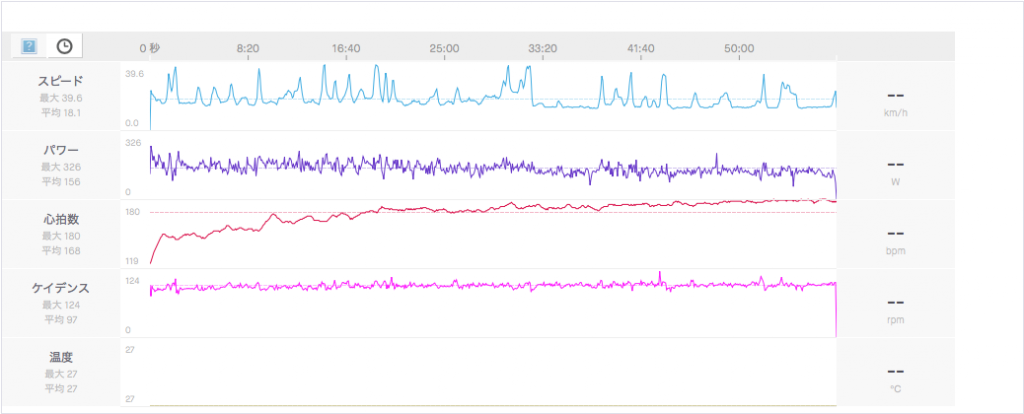
ガーミンのパワーメーターによれば、前回の平均パワーが156wで、今回は159w。つまり、私=人間としては、ほぼ同じ出力でバーチャル・ヒルクライムを行うことができた…と考えていいと思います。
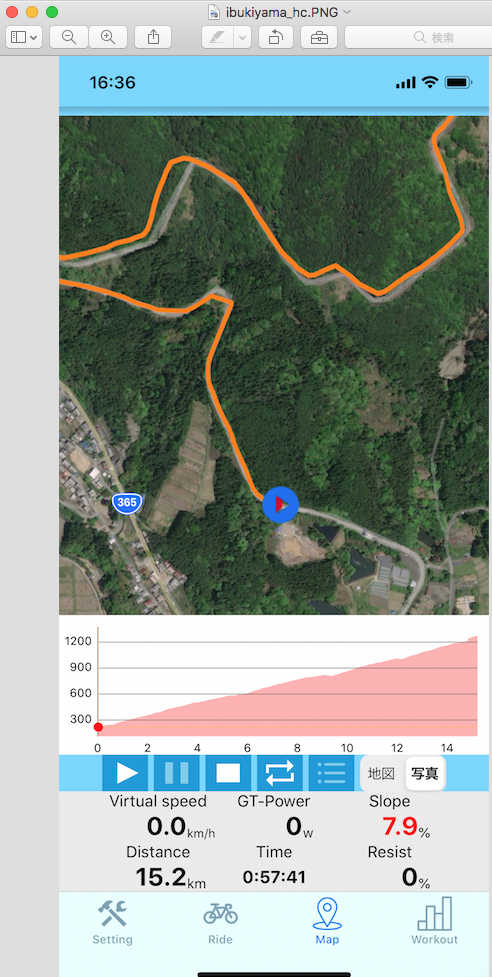
一方タイムとしては、前回が58分なのに対し、今回は101分(1時間41分)となり、まったく異なる結果です。
今回、パワー校正はやり直しましたが、その結果は、「精度が向上した」というよりも、前回とは逆に負荷の設定が重くなり過ぎた…のかもしれません。
パワー校正を行うと、その設定に基づいて、実走のスピード/走行距離(ガーミンが検知したスピート/走行距離)よりも、スマホアプリが評価するスピード/走行距離(ローラーが検知したスピード/走行距離)が少なくなります。これにより、ローラーの回転の重さだけではなく、それ以外の全体的な「坂道を走る際の体への負担」を表現しているようです。
今回の設定では、それが行き過ぎた(スマホアプリが評価するスピード/走行距離が少な過ぎる…)ように感じます。
→GPSデータ上の距離=スマホアプリが評価した距離が15.4kmであるのに対し、ガーミンで記録した距離=実際に走った距離は、1.8倍の27.5kmになっています。
(つまり、スマホアプリが評価したスピード/走行距離は、ガーミンが表示/記録した値の0.56倍の小ささです)
PinP表示しているスマホの画面を見ていただくと、アプリで表示されるスピード等が、サイコン(ガーミン)のセンサーで検知したパワー/速度よりも小さいことが確認できると思います。
GPSデータをアプリに読み込むことで、いろいろなヒルクライム大会を含めた「任意の実コース」をバーチャルで走ることができるのは非常に面白い機能ですが、勾配と負荷の感覚を実走に近づけることは一筋縄ではいかないという印象です。
うーん、なかなか難しいもんです。
まあ、負荷の設定は、重い方がトレーニングにはなりますかね…